0 引言
变电站巡视作为基层通信运维班组日常工作中重要的一环,对于确保电力生产安全稳定运行有着非常重要的意义[1]。在实际工作中,通信运检班发现变电站巡视工作时占用工作时间太多,导致工作人员外出巡视时班组本部人手出现短缺,并且人工巡检工作效率十分低下。针对这个问题,传统的解决办法是在各变电站附近设立工作站,常驻工作人员巡视,或者在各变电站周围招募外包团队代为巡视。但是这2种方案实际效果不佳,且实施难以实现[2-3]。因此本课题提出一种全新的、能够确定“远程信息本地化、管理信息实时化”的新型巡视模式,即通过远程监控的技术手段,在基层变电站和控制中心实现信息实时互通、统一管理[4-6]。
1 系统需求目标和可行性分析
本系统的目标是可以对变电站机房内的情况进行远程巡视,改善实际工作中遇到的变电站巡视效率低的问题。课题的总体目标为采用变电站远程巡视系统在工作时间内完全读取变电站机房内全部数据[7]。由于巡视工作对于数据准确性的要求非常高,需要正确地获取全部数据,结合高效运维的工作需求,系统设定目标为:30 min内获取的机房内数据量达到280个以上。
根据2017年1月到4月的工作记录统计分析以及最新查询结果显示:
1)目前的民用摄像头已经具备了采集数据的能力,并可以通过变电站机房与本公司之间已有的告警信息通路传输[8];
2)公司大力支持创新,小组成员熟悉通信技术、编程和调试,并有参与QC小组活动的经验,有较强的方案设计和动手制作能力,并有相关人员为活动提供技术指导;
3)有与电力行业相关的远程视频监控系统可供借鉴;课题所应用的设备都属于小型可控范围,在小组的技术水平范围之内[9];
4)据班组工作记录,3月7日工作人员曾在白石岩变电站仅用30 min便采集了所有数据。
由此可见,该系统需求目标完全是可以实现的。
2 系统总体方案和功能模块
2.1 系统总体方案
目前,远程巡视系统主要有2种实现方式:第一种是以高清摄像头采集预设点位的信息,将它们通过本公司设置的服务器内置程序呈现在提前建好的模型上;第二种是采用全景摄像头摄录整个机房的情况,将得到的全部数据传输回本公司,以真实图像呈现的全景方式[10]。
2017年6月12日,工作人员在白石岩变电站机房内以光纤配线架为实验对象,取其上的72个数据为目标样本分别进行对2种方案进行实验,实验结果见
 表1 远程巡视系统实现方式比较Tab.1 Comparison of remote inspection system implementation
表1 远程巡视系统实现方式比较Tab.1 Comparison of remote inspection system implementation
由
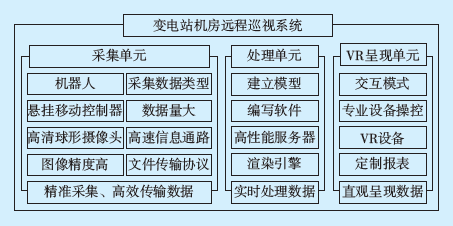 图1 巡视系统方案架构Fig.1 Inspection system scheme architecture
图1 巡视系统方案架构Fig.1 Inspection system scheme architecture
2.2 功能模块
2.2.1 采集单元模块
采集单元模块由机器人、悬挂移动控制器、高清球形摄像头等构成,数据采集方式主要有所有实景信息采集和预设点位只抓取示数和信号灯2种,实景信息采集优点是数据量大,峰值为200 Mb/s,灵活性高,并且后期几乎不需要处理即可展现;缺点是细微部分较差,对于细微问题难以发现,预设点位的方式则和实景信息采集的特点刚好相反[12]。为了更好的及时发现和处理问题并且减少后期数据处理,本系统采取预设点位和实景信息采集并用的方式,即:一般情况下采集预设点位的信息,同时保留实景模式作为辅助,有需要时可以查看现场的真实情况。并且提出了用二维码辅助方案二的设想,通过扫描设备上的二维码,系统可自动识别设备的信息,解决了该方案无法变通的缺点。
采集单元决定了采集数据的清晰度,影响采集数据清晰度的因素有:搭载摄像头方式、摄像头、机柜柜门。通过综合对比并结合实际情况,本系统采用益可达YKD-NSZ-10轨道式机器人搭载DS-2DC7520IW-A 500万球形摄像头配合玻璃柜门方案,测试结果达到预期效果,由此确定采集数据部分为此方案。同时,考虑到光纤配线架 (Optical Distribution Frame,ODF)机柜上有部分采点对象距离地面高度仅30 cm,不易于从天花板上设立的轨道上的机器人采集,故在ODF机柜设立自动开门装置,在机器人巡视到时自动开门。
由于传输最高瞬时带宽为200 Mb/s,目前,从白石岩变电站到广元公司已有带宽为1 Gb/s的数据传输通道,满足本系统的带宽需求。因此决定沿用已有通信线路,对于传输协议的选择,TCP协议虽然在丢包率、延迟、实际传输速率的实测结果中的性能比UDP协议高,但速率可能无法达到系统要求,并且测试结果表明UDP协议传输对于数据丢包率、延时等对于实际接收展示质量可忽略不计,因此系统选用UDP协议进行数据传输[13-14]。
服务器选择方面,本系统需要处理渲染的数据量较大,需要性能较好的服务器。本公司服务器保有量较大,为物尽其用,节约成本,本系统决定选用本公司闲置的E3-1230 V3服务器。
2.2.2 处理单元模块
处理单元模块主要由建立模型、编写软件、渲染引擎等组成。机房3D数据化需要对机房场景及设备进行三维模型制作配合VR模式数据呈现,模型制作的方式直接影响制作的效率和最终呈现的效果。根据实际情况,初步确定在3DS MAX、MAYA 2种建模方案中选择,二者特点如下。
1) 3DS MAX是目前世界上应用最为广泛的效果图及动画制作软件之一 ,被广泛应用于影视制作、广告设计、建筑装潢设计、三维游戏制作等方面。3DS MAX制作团队数量较多。角色和游戏方面的制作不如MAYA。
2)MAYA讲求细节,动画作品制作精致细腻,许多影视大片都用MAYA团队完成。MAYA的 POLYGONS(多边形)建模明显不如3DS MAX使用方便。
从精细度、易建模和经济性综合对比,最终采用3DS MAX建模方案。
机房3D数据化需要对机房场景及设备进行一些便捷操作,以便观察记录。系统选择目前主流的Unreal Engine 4引擎,并采用C语言进行平台开发[15]。
2.2.3 VR呈现单元模块
作为呈现数据的呈现单元,VR设备是非常重要的一环。目前市面上的VR设备良莠不齐,主流设备分别是Facebook公司旗下的Oculus Rift、HTC公司旗下的Vive、索尼公司旗下的PlayStation VR。PSVR兼容性太差,首先剔除。远程巡视需要较大活动空间,在其他方面大致相同的前提下,从系统兼容性、分辨率以及系统追踪3个方面做对比,最终选用HTC Vive作为呈现单元。
根据以往的机房设备巡视记录表,需要巡视的内容都是标准数字的示数、红黄绿灯等可简单图像识别的数据,使用简单的图像处理系统识别之后,系统可以自行制作电子数据报表并存档。根据确定的最佳方案,制订了详细的方案实施对策表(见
 表2 最佳方案实施对策表Tab.2 The best implementation countermeasure table
表2 最佳方案实施对策表Tab.2 The best implementation countermeasure table
3 系统建模和测试
本系统通过实地测量机房内建筑和各机柜的尺寸、构架,用3DS MAX建立了与实景1:1的等比例模型。
3.1 根据对策表实施对策
依据方案和对策表定制了需要的悬架和轨道,于2017年6月10日将悬梁和采集单元安装完成。在安装完成后将机器人速度设置为沿轨道用时20 s完成一次往返,进行8次稳定性测试,结果见
 表3 机器人运行稳定性测试Tab.3 The test list of robot operation stability
表3 机器人运行稳定性测试Tab.3 The test list of robot operation stability
实验结果非常令人满意,系统安装的轨道机器人达到了预期目标。
3.2 开发呈现系统
系统基于Unreal Engine 4引擎,使用C语言开发符合需求的系统。开发完成后,将建好的模型导入并测试了延迟。
经过试验,本系统的延迟时间<20 ms,达到预设要求,且非常稳定,表明系统开发成功。
3.3 HTC Vive呈现
本系统根据HTC Vive套件说明书进行了安装调试,成功后导入模型和程序进行试验。为保证系统的可靠性,对设备延迟时间进行了测试,试验结果表明,在连续不断运转10 h之后,系统的延迟小于预设目标100 ms,且几乎没有变化,达到了系统的预期要求。
3.4 制作数据报表
根据使用的机房设备巡视记录表,系统制定了将生成的报表项目。由于所要采集的数据都是标准数字、红黄绿灯等,运用简单的图像识别技术即可自动识别。系统预设置了机房内设备的关系图。基于此关系图,制作完成了机房设备巡视表格式(见
共设置了5次试验,检测报表生成速度和数据准确性,试验结果见
经过试验,数据报表生成时间小于预设目标10 min,且准确度达到100%,试验成功。
3.5 系统联调
9月2日,对整套系统进行了联合调试。实测结果见
由于实施对策时每一步都严谨地进行了成效检查和分析,所以系统联调取得成功。
3.6 目标检查
系统根据对策表实施完成了所有的准备工作,在2017年9月10日进行目标检查,检查效果见
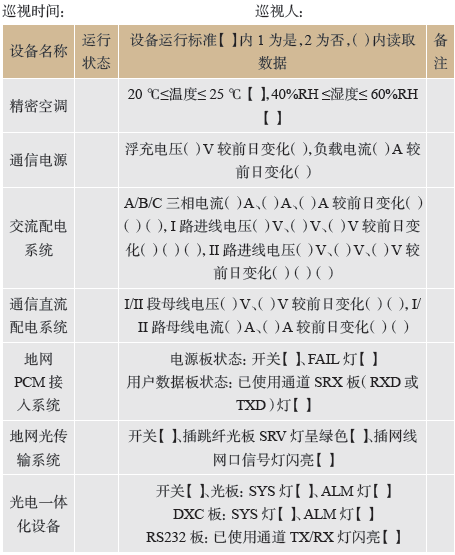 表4 机房设备巡视记录Tab.4 The inspection record of information computer room
表4 机房设备巡视记录Tab.4 The inspection record of information computer room
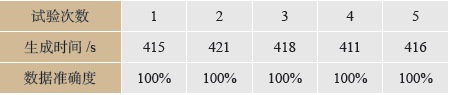 表5 报表生成速度和准确性Tab.5 The speed and accuracy of report table generation
表5 报表生成速度和准确性Tab.5 The speed and accuracy of report table generation
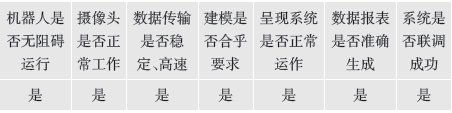 表6 系统联调效果测试表Tab.6 The test list of system inter modulation effect
表6 系统联调效果测试表Tab.6 The test list of system inter modulation effect
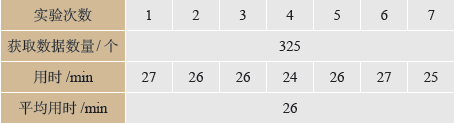 表7 目标检查效果Tab.7 The effect of object check
表7 目标检查效果Tab.7 The effect of object check
与传统方法巡视白石岩变电站用时230 min对比,应用变电站机房远程巡视系统,在30 min内就能完整、准确地获取所需的325个数据,并且能生成巡检报表,方便查阅,系统制定的方案目标完全达到要求。
4 结语
至2017年10月15日为止的5周时间内,该系统在白石岩变电站例行巡查了5次,每一次都进行了人工巡视和利用本系统巡视的效果对比。本系统获取数据的准确率都达到了100%,显现出相当的可靠性。
变电站机房远程巡视系统彻底改变了传统巡视模式,将工作人员到站巡查的传统巡查模式变为远程在线巡查模式,在30 min内就能准确获取巡视的机房内所需的所有数据,大大提高工作效率;减少了发生故障到查出故障的时间,减少了变电站脱网风险。