(四)红外热成像测温
1.红外热成像测温原理
自然界中的一切物体,只要其温度高于OK,就会向外发射辐射能,因此从原理上讲,只要能收集并探测这些辐射能,就可以获得物体的热图像,从而推测出物体的温度。
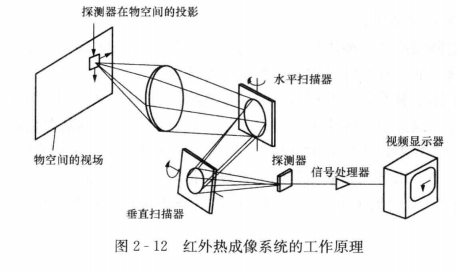
红外热成像系统的工作原理如图2-12所示,光学系统先将现场的红外辐射能汇集起来,经光谱滤波和光机扫描,聚集到探测器的红外元件的阵列上,探测器将强弱不同的辐射信号变成电信号,然后经放大和视频处理,形成视频信号,再送至显示器。
2.红外热成像系统的类型
红外热成像系统可以分成两种类型,即光机扫描型和非光机扫描型。光机扫描型红外热成像系统的特点是通过光机扫描使单元探测器依次扫过被测温对象的各部分,形成被测温对象的二维图像。非光机扫描型红外热成像系统是利用多元探测器面阵,使探测器中的每个单元与被测温对象的一个微元面对应,因此无需光机扫描。常用的凝视型热成像系统就属于这种类型。
与非光机扫描型红外热成像系统相比,光机扫描型红外热成像系统扫描速度慢,系统结构复杂,但其测温误差小,适合于稳态和测量精确度要求高的场合。
由于超大规模硅集成电路技术的迅速发展,目前已可获得高均匀响应度、高密度的探测器面阵,使非光机扫描型红外热成像技术获得了极大的进步。图2-13所示为非光机扫描型红外热成像系统(凝视型)原理框图。
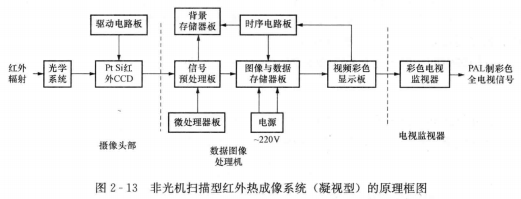
与光机扫描型红外热成像系统相比,凝视型红外热成像系统的最大优点是,无需光机扫描机构,简化了结构,编小了体积,大大提高了热成像系统的快速响应特性。从理论上讲,这种热成像系统对景物辐射的响应时间只受探测器时间常数的限制,而不再受扫描机构扫描速度的影响,故凝视型红外热成像系统所能达到的快速响应能力,是光机扫描型红外热成像系统所无法比拟的,故适合于动态测温;缺点是,受探测器光谱响应范围的限制,其所能测量的温度有一定的范围,改变测温范围时,要换探测器和相应的处理软件。
热释电红外热成像系统也属于非光机扫描型红外热成像系统,它采用热释电材料作靶面,制成热释电摄像管,直接利用电子束扫描和相应的处理电路,将被测物体的温度信号转换成电信号。热释电红外热成像系统的优点是:结构简单,不需要制冷,光谱响应范围可以覆盖整个红外波段,故可测量常温至3570℃的温度;其缺点是测温误差较大。
3.红外热成像系统的基本参数
红外热成像系统的基本参数有瞬时视场、取像速率、扫描效率、驻留时间、热灵敏度、总视场、最小可分辨温差、最小可探测温差等。
(1)瞬时视场。瞬时视场代表了红外热成像系统的空间分辨能力,它是指探测器的线性尺寸对系统景物空间的二维张角,取决于探测器的形状、尺寸和光学系统的焦距。
如果探测器为矩形,其边长为a和6,则瞬时视场的场角分别为

(2)总视场。总视场代表红外热成像系统可测量区域的大小,即系统所观察到的景物空间的二维视场角。总视场取决于景物空间的大小和光学系统的焦距。假设总视场在水平方向和垂直方向的尺寸分别为W。和Wp,则系统一帧图像中所包含的像元数的最大值为

该式表明,探测器的尺寸越大,系统的分辨率越高。
(3)取像速率。取像速率表示红外热成像系统在单位时间内所能给出的完整画面数,如25帧/s。取像速率也称为帧频或帧速,其倒数,即系统扫过一幅完整画面所需的时间,称为帧周期或帧时。若用fp表示帧频,Tf表示帧时,则它们之间的关系为

(4)扫描效率。红外热成像系统对景物扫描时,由于同步扫描、回扫、直流恢复等都要占时间,因此在这个时间内将不产生视频信号,称此时间为空载时间,通常用T1f表示。帧
时和空载时间之差(Tf-T1f)称为有效扫描时间。
有效扫描时间与帧时之比称为系统的扫描效率nsc,即

(5)驻留时间。探测器驻留时间是扫过一个探测器张角所需的时间。当扫描速度为常
数,系统的空载时间为零时,单元探测器的驻留时间Tdl为

若探测器为押个单元并联的探测器,则驻留时间Cd为

实际上系统的空载时间不可能为零,因此当空载时间不为零时,式(2-11)和式(2-12)还应乘以扫描效率。
(6)热灵敏度。对红外热成像系统而言,探测器不仅能接受到入射辐射能的信号,还能接受由其他因素,如环境和本机等所引起的噪声信号。噪声信号的存在限制了探测器对微弱信号的探测能力。通常用噪声等效功率NEP来表示探测器或红外热成像系统的热灵敏度,即
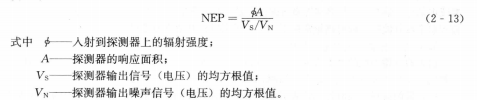
可见噪声等效功率表征了探测器所能探测的最小辐射强度,该值越小,探测器的性能越好。